Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published in IEEE Humanoids, 2017
Recommended citation: Qingbiao Li, Iordanis Chatzinikolaidis, Yiming Yang, Sethu Vijayakumar, and Zhibin Li. Robust Foot Placement Control for Dynamic Walking Using Online Parameter Estimation. IEEE Humanoids (ERA-C, Qualis-B2), 2017. http://qingbiaoli.github.io/files/humanoid2017.pdf
Published in The Hamlyn Symposium on Medical Robotics, 2018
Recommended citation: J. Q. Zheng, X. Y. Zhou, Q. B. Li, C. Riga and G. Z. Yang, Abdominal Aortic Aneurysm Segmentation with a Small Number of Training Subjects, The Hamlyn Symposium on Medical Robotics, 2018 https://arxiv.org/pdf/1804.02943.pdf
Published in The Hamlyn Symposium on Medical Robotics, 2018
Recommended citation: Li, Q. B., Zhou, X. Y., Lin, J., Zheng, J. Q., Clancy, N. T., & Elson, D. S. (2018). Estimation of Tissue Oxygen Saturation from RGB Images based on Pixel-level Image Translation. arXiv preprint arXiv:1804.07116. http://qingbiaoli.github.io/files/HSMR2018.pdf
Published in International Conference on Autonomous Agents and MultiAgent Systems (AAMAS), 2020
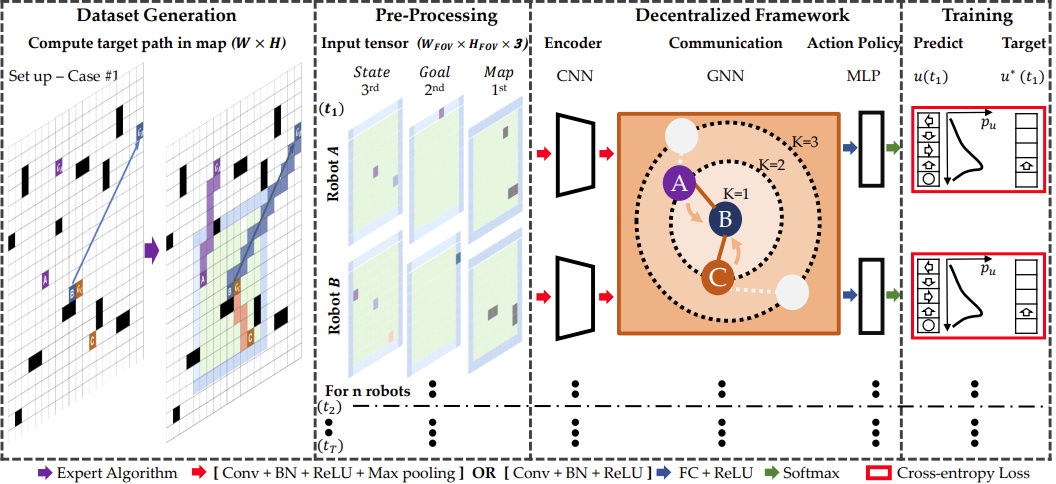
Recommended citation: Li, Q., Gama, F., Ribeiro, A. and Prorok, A., 2020, May. Graph Neural Networks for Decentralized Path Planning. In Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems (ERA-A, Qualis-A1), pp. 1901-1903, 2020 http://ifaamas.org/Proceedings/aamas2020/pdfs/p1901.pdf
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2020
Recommended citation: Qingbiao Li, Fernando Gama, Alejandro Ribeiro, Amanda Prorok. “Graph Neural Networks for Decentralized Multi-robot Path Planning,” IEEE/RSJ International Conference on Intelligent Robots and Systems (CCF-C, ERA-A, Qualis-A1), 2020. https://arxiv.org/abs/1912.06095
Published in IEEE International Conference on Robotics and Automation (ICRA), 2020
Recommended citation: Ruoxi Wang, Dandan Zhang, Qingbiao Li, Benny Lo. “Real-time Surgical Environment Enhancement for Robot-Assisted Minimally Invasive Surgery Based on Super-Resolution,” IEEE International Conference on Robotics and Automation (CCF-C, ERA-A, Qualis-A1), 2021. arXiv preprint arXiv:1912.06095. https://arxiv.org/pdf/2011.04003.pdf
Published in IEEE International Conference on Robotics and Automation (ICRA), 2021
Recommended citation: Jan Blumenkamp, Qingbiao Li, Amanda Prorok. “Evaluating the Sim-to-Real Gap of Graph Neural Network Policies for Multi-Robot Coordination,” IEEE International Conference on Robotics and Automation (CCF-B, Qualis-A1), Real World Swarms Workshop, 2021. arXiv preprint arXiv:1912.06095. https://drive.google.com/file/d/1yEKb-kKZotBvNm82bhuVWi56K8p927dR/view
Published in Conference on Robot Learning (CoRL), 2021
Recommended citation: Amanda Prorok, Jan Blumenkamp, Qingbiao Li, Ryan Kortvelesy, Zhe Liu, Ethan Stump. “The Holy Grail of Multi-Robot Planning: Learning to Generate Online-Scalable Solutions from Offline-Optimal Experts,” Conference on Robot Learning. 2021 https://arxiv.org/pdf/2107.12254.pdf
Published in IEEE International Conference on Robotics and Automation (ICRA), 2022
Recommended citation: Jan Blumenkamp, Steven Morad, Jennifer Gielis, Qingbiao Li, Amanda Prorok. “A Framework for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies,” IEEE International Conference on Robotics and Automation (CCF-B, Qualis-A1), Under Review, 2021
Published in International Conference on Learning Representations (ICLR), 2022
Recommended citation: Hudson Benjamin, Qingbiao Li, Matthew Malencia, and Amanda Prorok. “Graph Neural Network Guided Local Search for the Traveling Salesperson Problem,” International Conference on Learning Representations (CCF-A, Qualis-A1), 2022
Published in International Journal of Computer Assisted Radiology and Surgery (IJCARS), 2019
Recommended citation: Qingbiao Li, Jianyu Lin, Neil T Clancy, Daniel S Elson. “Estimation of Tissue Oxygen Saturation from RGB Images and Sparse Hyperspectral Signals based on Conditional Generative Adversarial Network,” International Journal of Computer Assisted Radiology and Surgery (JCR Q3, IF 2.924). pp. 987–995. Springer, 2019. https://link.springer.com/content/pdf/10.1007%2Fs11548-019-01940-2.pdf
Published in IEEE Robotics and Automation Letters (RA-L), 2020
Recommended citation: B. Wang, Z. Liu, Q. Li and A. Prorok, "Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement Learning," in IEEE Robotics and Automation Letters (JCR Q2, IF 3.74), vol. 5, no. 4, pp. 6932-6939, Oct. 2020, doi: 10.1109/LRA.2020.3026638. https://ieeexplore.ieee.org/document/9205217/
Published in IEEE Transactions on Affective Computing, 2020
Recommended citation: Lin, W., Orton, I., Li, Q., Pavarini, G. and Mahmoud, M., 2020. Looking At The Body: Automatic Analysis of Body Gestures and Self-Adaptors in Psychological Distress. IEEE Transactions on Affective Computing (JCR Q1, IF 10.506). Springer, 2020. https://arxiv.org/abs/2007.15815
Published in IEEE Robotics and Automation Letters (RA-L), 2020
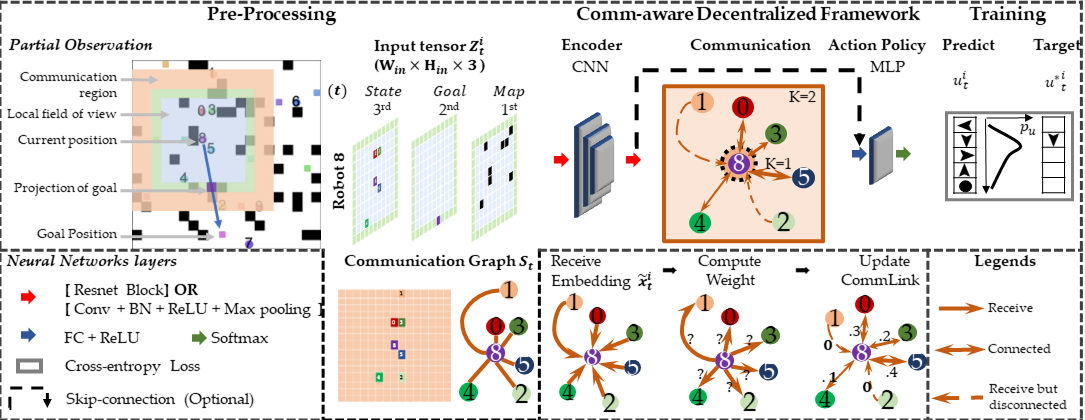
Recommended citation: Q. Li, W. Lin, Z. Liu and A. Prorok, "Message-Aware Graph Attention Networks for Large-Scale Multi-Robot Path Planning," in IEEE Robotics and Automation Letters (JCR Q2, IF 3.74), vol. 6, no. 3, pp. 5533-5540, July 2021, doi: 10.1109/LRA.2021.3077863. https://arxiv.org/pdf/2011.13219.pdf
Published in IEEE Robotics and Automation Letters (RA-L), 2022
Recommended citation: Lifeng Zhou, Vishnu D Sharma, Li, Qingbiao, Amanda Prorok, Alejandro Ribeiro, Vijay Kumar. “Graph Neural Networks for Decentralized Multi-Robot Submodular Action Selection,” IEEE Robotics and Automation Letters (JCR Q2, IF 3.74), Under Review https://arxiv.org/pdf/2105.08601.pdf
Published:
Department of Technology, R&D Centre, BBT Student Innovation Centre, South China University of Technology, 2012
He was in a team of IT fans called to develop website, Android & IOS application for Shuttle bus location and second hand online market.
Published:
Tutoring for Undergraduate course, School of Engineering, The University of Edinburgh, 2015
Tutoring for Undergraduate course, School of Engineering, The University of Edinburgh, 2016
Tutoring for Multi-Robot Systems (MRS), Department of Computer Science and Technology, University of Cambridge, 2019