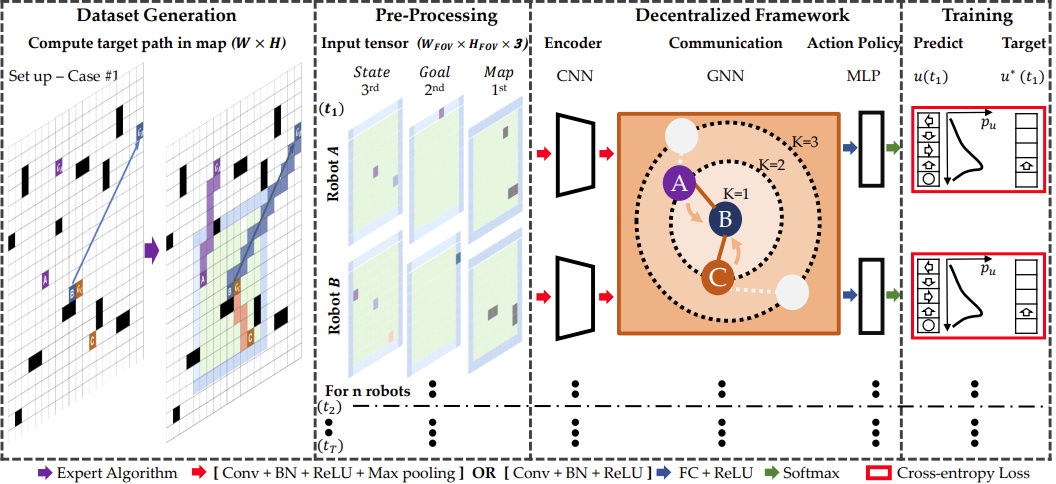
Graph Neural Networks for Decentralized Multi-Robot Path Planning
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2020
Recommended citation: Qingbiao Li, Fernando Gama, Alejandro Ribeiro, Amanda Prorok. “Graph Neural Networks for Decentralized Multi-robot Path Planning,” IEEE/RSJ International Conference on Intelligent Robots and Systems (CCF-C, ERA-A, Qualis-A1), 2020. https://arxiv.org/abs/1912.06095