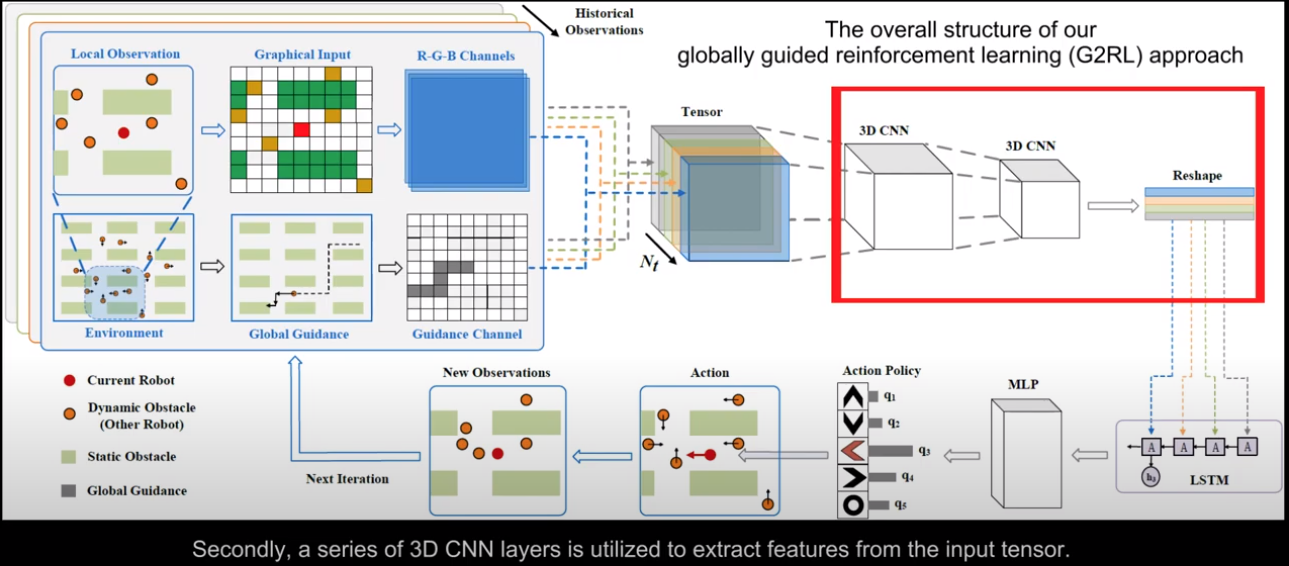
Mobile Robot Path Planning in Dynamic Environments through Globally Guided Reinforcement Learning
Published in IEEE Robotics and Automation Letters (RA-L), 2020
Recommended citation: B. Wang, Z. Liu, Q. Li and A. Prorok, "Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement Learning," in IEEE Robotics and Automation Letters (JCR Q2, IF 3.74), vol. 5, no. 4, pp. 6932-6939, Oct. 2020, doi: 10.1109/LRA.2020.3026638. https://ieeexplore.ieee.org/document/9205217/